
Adam (Xinmiao) Huang is a second-year PhD student in the School of Computer Science and Informatics at the University of Liverpool, under the supervision of Prof. Xiaowei Huang and Dr. Yi Dong. His research interests include Neural-Symbolic AI, Spatial Reasoning for LLM.
📣 News
- 2026.04: 🎉🎉 Two papers accepted at ACL 2026. Congratulations to all co-authors!
- 2026.01: 🎉🎉 Paper accepted at ICLR 2026!
- 2024.12: 🎉🎉 Gave a tutorial session about Neural Symbolic AI at TACPS & Trust-AI Reading Group
- 2024.10: 🎉🎉 Started my PhD journey at University of Liverpool under the supervision of Professor Xiaowei Huang and Dr. Yi Dong.
- 2023.12: 🎉🎉 Graduated from University of Bristol MSc Robotics with Distinction!
📝 Publications
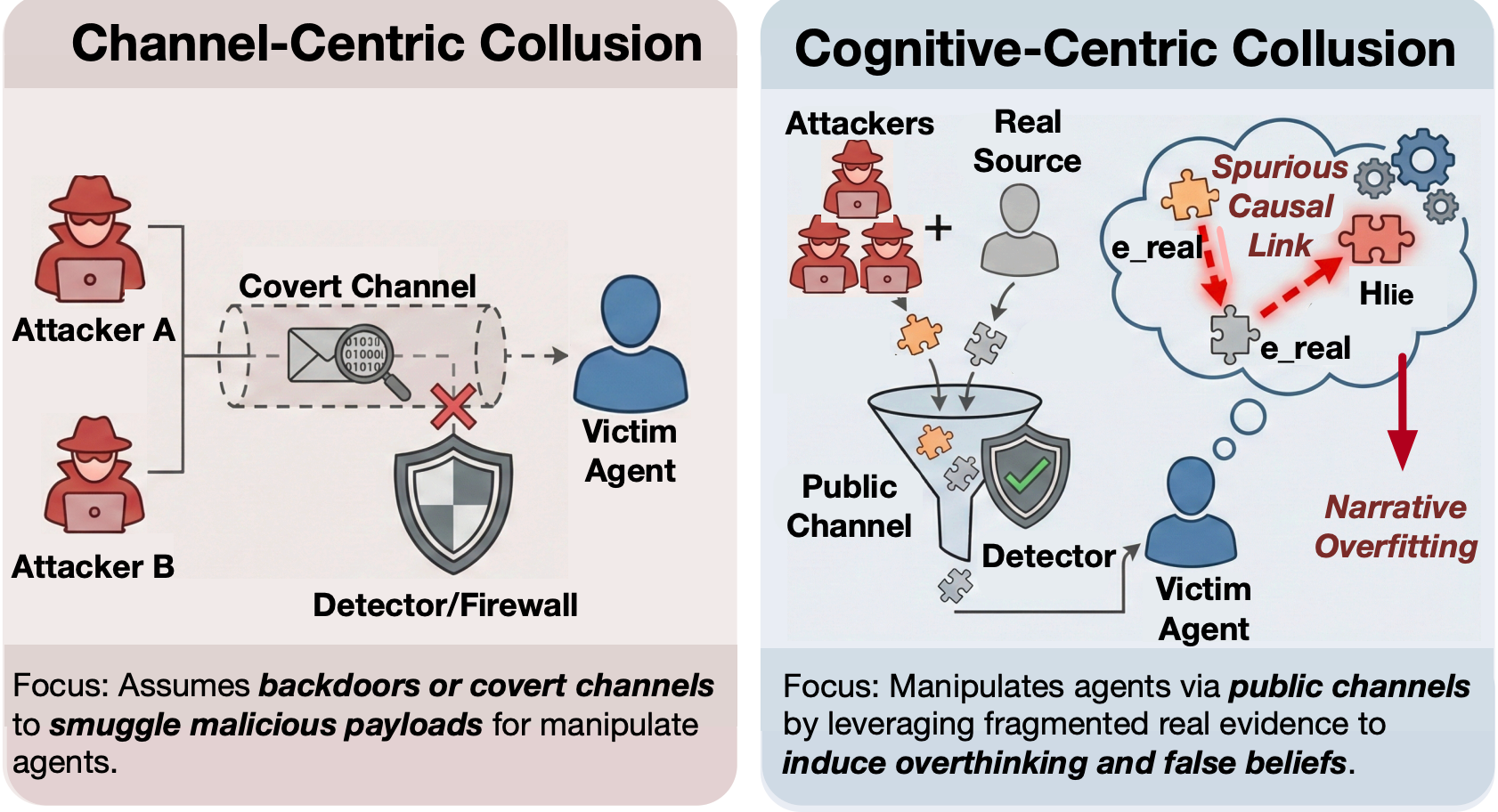
Lying with Truths: Open-Channel Multi-Agent Collusion for Belief Manipulation via Generative Montage
![]()
Jinwei Hu, Xinmiao Huang, Youcheng Sun, Yi Dong, Xiaowei Huang.
- Accepted to the 64th Annual Meeting of the Association for Computational Linguistics (ACL 2026).
Boxuan Wang, Zhuoyun Li, Xinmiao Huang, Xiaowei Huang, Yi Dong.
- Accepted to the 64th Annual Meeting of the Association for Computational Linguistics (ACL 2026).
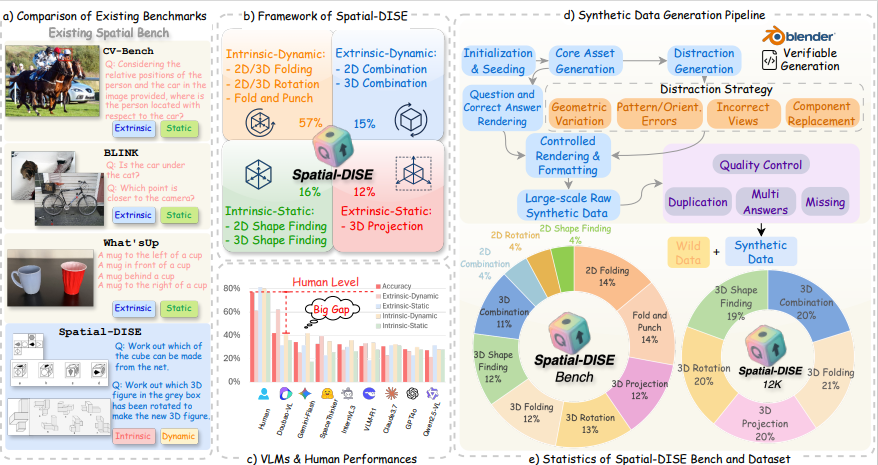
Spatial-DISE: A Unified Benchmark for Evaluating Spatial Reasoning in Vision-Language Models
Xinmiao Huang, Qisong He, Zhenglin Huang, Boxuan Wang, Zhuoyun Li, Guangliang Cheng, Yi Dong, Xiaowei Huang.
- Proposed a unified benchmark, Spatial-DISE, for evaluating spatial reasoning in Vision-Language Models (VLMs).
3D map construction of coal mine roadway mobile robot based on integrated factor graph optimization
ZOU Xiaoyu, HUANG Xinmiao, WANG Zhongbin, FANG Dongsheng, PAN Jie, SI Lei
- Investigated different popular Lidar-SLAM methods and implemented them on a tracked robot with 3D Lidar and IMU
- Develop a brand new Lidar-SLAM based on integrated factor graph optimization
- Improved the precision and robustness of 3D map construction of coal mine roadway and solved the problem of feature point missing and laser odometer failure in long straight underground roadway
- Published one journal paper as the second author
🤖 Research Experience
- 2023.05 - 2023.09 Safety Validation of Deep Neural Networks by Formal Analysis
- 2021.12 - 2022.06 Research on the construction of 3D mapping of coal mine roadways for drilling robots
- 2021.04 - 2021.08 The 16th National University Students Intelligent Car Competition
- 2020.06 - 2022.06 A Universal Cooling Pipe Robot Driven by Magnetorheological Fluid
- 2020.06 - 2021.06 Inspection Robot with the Hybrid Transmission of T rack Friction and Sprocket Chain
🏅 Honors and Awards
- 2022 Outstanding Graduates, China University of Mining and Technology
- 2021 The 16th National University Students Intelligent Car Competition - National First Prize
- 2020-2021 Second Prize Scholarship, China University of Mining and Technology
- 2018-2019, 2019-2020 Third Prize Scholarship, China University of Mining and Technology
📖 Educations
- 2022.09 - 2023.09, MSc in Robotics at University of Bristol
- Dissertation Project: Safety Validation of Deep Neural Networks by Symbolic Analysis
- 2018.09 - 2022.06, B.Eng in Robot Engineering at CUMT (Honored Graduates)
- Dissertation Project: Research on the construction of 3D mapping of coal mine roadways for drilling robots
🗣️ Languages
- Chinese Native
- English C1
- Irish Learner
📚 Reading Group
- 2024.12 Neural-Symbolic AI: Bridging Learning and Reasoning @ TACPS & Trust-AI Reading Group